-
기계공학과 김의겸 교수팀이 복잡 난해한 표면의 접촉 정보를 빠르고 정확하게 측정할 수 있는 신개념의 접촉 감지 방법을 개발했다. 휴머노이드 로봇·산업용 협동 로봇의 촉각 감지 장치로 활용되어 보다 긴밀하고 원활한 인간·로봇 협력 작업을 가능케 할 것으로 기대된다. 김의겸 기계공학과 교수는 복잡 난해한 비정형 표면에서도 접촉 측정이 가능한 알고리즘을 개발했다고 밝혔다. 이번 연구 내용은 ‘인간-로봇 협력 작업을 위한 비정형 형상의 접촉 감지 방법(Arbitrary Surface Contact Sensing Method for Physical Human-Robot Interaction)’이라는 제목으로, 자동화 및 제어 분야의 저명 학술지인 <IEEE 산업정보학회 저널(IEEE Transactions on Industrial Informatics> 3월호에 게재됐다.아주대 기계공학과의 정다운 연구교수(위 사진 가운데)와 부성운 학생(석사과정, 위 사진 오른쪽)이 공동 제1저자로 참여했고, 김의겸 교수(교신저자, 위 사진 왼쪽)가 함께 참여했다.로봇 분야에서 ‘접촉 정보’는 조작, 인지, 상호작용 등 다양한 측면에서 중요하게 활용된다. 접촉 정보란 ▲외부 물체와 접촉된 위치와 방향 ▲작용하는 힘의 강도를 모두 포함한다. 그동안 접촉 정보를 정확하게 측정하기 위해 많은 장치와 방법들이 연구되어 왔으나, 여러 한계들로 인해 아직 완전하게 정밀한 측정은 이루어지지 못하고 있다. ▲측정 성능이나 ▲기계적·전자적 연결 구성의 복잡성 ▲다중 신호 처리를 위한 소프트웨어 등 어렵고 도전적인 문제들이 아직 해결되지 못한 채 남아있기 때문이다. 그중 기존 힘·토크 센서를 이용해 접촉 정보를 측정하는 방법은 측정되는 6축의 힘과 표면 형상의 수학적 모델을 이용한 기하학적 관계를 활용하여 구현되고 있다. 그러나 원통이나 구형처럼 정형화된 표면이 아닌, 복잡한 비정형 형상의 표면에 대해서는 이러한 기하학적 관계를 알기가 매우 어렵거나, 필요한 연산량이 많다. 이러한 이유들로 복잡한 표면에 대한 접촉 정보 측정 방식이 정교하게 개발되지 못했고, 때문에 로봇 시스템에의 실제 적용이 불가능했다. 김의겸 교수 연구팀은 이러한 한계를 극복하기 위해 원천적으로 새로운 방법론에 착안했다. 더불어 지속적 연구를 통해 접촉 정보 측정을 위한 알고리즘 개발부터 장치 디자인, 구현 및 검증까지를 직접 진행했다. 연구팀은 주로 컴퓨터 그래픽에서 물체의 형상을 표현할 때 사용되어온 삼각메쉬구조(Triangle mesh structure)를 표면 기하학적 정보를 알아내기 위해 활용했다. 이를 통해 수많은 삼각형으로 이뤄진 메쉬구조에서 정확한 접촉 정보를 알아내는 알고리즘을 개발해냈고, 접촉력의 크기뿐 아니라 3차원 방향과 3차원 위치를 모두 정밀하게 측정하는 데 성공했다. 연구팀은 0.4ms의 빠른 연산 속도로, 0.134mm 이내의 정밀한 접촉 위치 정보를 확인했다. 김의겸 교수는 “이번 연구는 다양한 형상 표면에 대해 실시간으로 정밀하게 접촉을 감지할 수 있음을 보여주는 성과”라며 “정교한 힘 제어가 필요한 휴머노이드 로봇이나 산업용 협동 로봇 등에 활용될 수 있을 것”이라고 설명했다.산업 공정에서 인간과 로봇의 원활한 협력(interaction)을 위해서는 협동 로봇(co-robot)의 안정성과 정교함이 필수적이다. 협동 로봇은 일반적인 산업용 로봇처럼 위험이 수반되어 별도의 단독 공간이 필요한 경우와 달리, 사람과 물리적으로 상호작용하면서 같은 공간에서 작업할 수 있는 로봇을 말한다. 사람과 로봇이 같은 공간에서 작업을 하기 위해서는, 작업자와 로봇이 충돌해도 작업자가 안전할 수 있어야 하며 로봇이 제대로 작동할 수 있도록 비교적 간단한 방법으로 교시(敎示, teaching)가 가능해야 한다. 이에 아주대 연구팀의 이번 성과를 기반으로 보다 원활하고 다양하며 섬세한 인간의 협동 로봇 조작 작업 교시가 가능해질 수 있을 것으로 기대된다. 김 교수는 “이번에 개발한 기술을 협동 로봇에 적용하면 로봇과의 커뮤니케이션 범위가 더 넓어질 수 있다”며 “사람이 직접 로봇을 잡고 방향이나 위치를 조작하거나, 간단한 그림을 로봇 팔에 직접 그리는 등의 방식으로 여러 작업을 교시할 수 있다”라고 덧붙였다.더 나아가 신개념의 디스플레이나 모빌리티 등의 터치 패널로 활용되어 새로운 형태로 센서 데이터를 얻는 데에도 적용될 수 있을 것이라는 게 연구팀의 설명이다. 김의겸 교수는 지능형 로봇(Interactive & Intelligent Robotics) 분야를 연구하며 ▲섬세한 도구 조작까지 가능한 일체형 인간형 로봇 손 ▲전 방향 물체 조작이 가능한 다자유도 로봇 그리퍼 ▲자동화 로봇 보정 장치 등을 개발해 학계와 산업계의 주목을 받아왔다. 이번 연구는 산업통상자원부의 로봇산업핵심기술개발사업의 지원으로 수행됐다.복잡한 비정형의 표면에서 별 모양을 그렸을 때 인식하는 모습. 힘의 위치와 방향, 크기 모두를 빠르고 정확하게 알 수 있다. 아주대 연구팀이 개발한 복잡한 표면에서 접촉력 찾기 방법의 전체적인 구성. 복잡한 형상의 표면을 삼각형메쉬형태로 재구현하여 표현한 사진. 많은 삼각형 중 실제 접촉이 일어나는 삼각형을 찾고, 삼각형 안에서 정확히 어느 위치에 접촉력이 가해지는지 찾는 과정이다.
-
149
- 작성자통합 관리자
- 작성일2024-04-16
- 2317
- 동영상동영상
-
우리 학교 이재현 교수팀이 ‘꿈의 물질’ 그래핀을 이상적으로 구현할 수 있는 새로운 적층법을 개발했다. 이를 통해 초경량·초고강도 특성을 가진 복합소재를 구현해 냄으로써 향후 소형 전자기기와 자동차 및 우주항공 분야 등에 적용되는 고부가가치 원천소재로 활용될 수 있을 전망이다.18일 이재현 교수(첨단신소재공학과·대학원 에너지시스템학과) 연구팀은 삼성디스플레이·부산대학교·한국과학기술연구원(KIST) 연구진과 함께 원자층 두께의 단층 그래핀을 물에 띄운 상태로 말아 올리는 부유식-적층 공법을 개발했다고 밝혔다. 연구팀은 이 공법을 통해 수백 층의 그래핀이 고분자 필름 내부에 일정한 간격으로 적층배열된 세계 최고 성능의 초경량·초고강도·고열전도 복합소재를 제조하는 데 성공했다.관련 논문은 ‘부유식-적층법으로 제작된 그래핀-PMMA 복합소재(Float-stacked graphene-PMMA laminate)’라는 제목으로 나노 분야의 저명 학술지인 <네이처 커뮤니케이션즈(Nature Communications)> 3월 온라인판에 개재됐다. 이번 연구에는 이재현 아주대 교수(첨단신소재공학과·대학원 에너지시스템학과), 이승기 부산대 교수(재료공학부), 조성호 삼성디스플레이 부사장이 교신저자로 참여했다. 제1저자로 아주대 김승일 박사과정 학생(대학원 에너지시스템학과)이, 공동 제1저자로 문지윤 아주대 박사후연구원(대학원 에너지시스템학과)과 형석기 아주대·한국과학기술연구원 박사과정 학생(신소재공학과)이 함께 했다.‘꿈의 물질’ 그래핀(graphene)은 두 개 이상의 물질이 결합 되어 각각의 물질보다 더 좋은 물성을 나타내는 복합소재의 가장 이상적 형태로 알려져 있다. 강철보다 200배 이상 강하면서도 매우 가볍고 높은 열전도 특성을 가지고 있는데다, 탄소 원자 한 층의 두께를 대면적으로 생산해낼 수 있다는 장점을 가지고 있어서다. 그러나 뛰어난 이론적 특성을 가지고 있음에도 불구하고 실제 그래핀 기반 복합소재의 특성을 일정 수준 이상으로 끌어올리는 데에는 한계가 존재했다. 그래핀의 층수가 작아질수록 강해지는 반데르발스 힘에 의해 입자의 응집 현상이 도드라지는 원천적인 문제를 갖고 있어, 복합소재를 이루는 기지(Matrix) 내에서 단층의 그래핀을 균일하게 분산하거나 이를 한 방향으로 정렬시키는 것이 불가능한 것으로 알려져 있었기 때문이다.탄소원자 한층의 두께를 가진 단층의 그래핀을 대면적으로 생산하는 과정에는 화학기상증착법이 라는 합성법이 대표적으로 활용되고 있다. 국내외의 연구자들은 화학기상증착법을 통해 준비된 단층의 그래핀을 고분자 혹은 금속과 복합소재화할 경우 그래핀의 이론적 특성을 극대화할 수 있을 것으로 예측해왔다. 하지만 화학기상증착법을 통해 합성된 그래핀 복합소재를 제조하기 위해서는 매우 얇은 두께의 그래핀 강화재와 고분자 기지를 한 층씩 반복하여 균일하게 쌓아 올려야 한다는 점에서 많은 시간과 공정, 비용을 필요로 한다. 때문에 이와 관련된 연구 기술은 검증 수준에 머물러 있는 단계다. 아주대 공동 연구팀은 이 같은 어려움을 해결하기 위해 부유식 공법(floating method)에 주목했다. 부유식 공법은 작은 힘에도 쉽게 깨지는 낮은 밀도의 유리를 높은 밀도의 용융 주석(Molten Tin) 위에 띄워 원하는 두께와 크기로 가공할 수 있는 방법이다. 낮은 밀도와 소수성을 가진 그래핀에 얇은 고분자막을 코팅한 후 물 위에 띄운 다음, 원하는 위치로 이동시키고 롤러(roller) 구조물에 이를 말아 올림으로써 빠르고 정확하게 적층 배열을 할 수 있게 되는 것. 연구팀은 이러한 과정을 반자동화 공정으로 구현, 복합소재를 제조했고 적층 간격과 크기, 두께 등을 원하는 대로 조절했다. 또한 제조한 복합소재의 강도와 탄성계수가 혼합물의 법칙(rule of mixture)을 그대로 따르는 것을 확인했다. 이는 그래핀이 가진 물성을 완전히 보존할 수 있는 이상적인 복합소재 구조를 구현했다는 것을 의미한다. 또 부유식 적층법을 통해 100층의 그래핀을 균일하게 삽입(부피비 0.19%) 할 수 있었고, 이를 통해 제작된 복합소재의 경우 강철은 물론 대표적 경량 비철금속인 알루미늄 합금보다 높은 비강도 비강도를 기록했다. 열전도도 역시 일반적인 고분자 필름 대비 2000% 이상 증가함을 확인했다. 이번 연구를 주도한 김승일 박사과정 학생은 “그래핀 강화재는 복합소재의 기지 내에 반무한 형태(semi-infinite)로 배열되었을 때 가장 이상적으로 재료의 물성을 향상시킬 수 있다”며 “이번 연구에서 개발한 부유식-적층법은 이러한 이상적인 구조를 구현할 수 있는 원천기술로, 대면적의 그래핀을 효율적인 방식으로 정밀하게 적층할 수 있게 한다”라고 설명했다. 이재현 아주대 교수는 “이번에 개발한 복합소재는 일괄공정이 가능하며 크기와 두께를 자유롭게 구현할 수 있어 그래핀 복합소재의 양산화를 가능하게 할 것”이라며 “지속적인 추가 연구를 통해 궁극적으로는 초소형 스마트 전자기기 및 우주 항공·자동차 산업에 사용되는 초경량·고강도 복합소재로의 활용이 가능할 전망”이라고 덧붙였다.이번 연구는 한국연구재단 중견연구자지원사업, 아주대학교 교내 연구비의 지원을 받아 수행됐다. 부유식-적층 공법을 통해 실제 제작된 약 5 cm X 10 cm 크기의 그래핀 복합소재. 100층의 그래핀이 100나노미터의 균일한 간격으로 결함 없이 적층됐다. 이재현 교수는 2010년 노벨물리학상 수상자 노보셀로프 교수의 제자다. 지난해 5월 노보셀로프 교수의 아주대 강연 후 단체사진* 위 사진 설명 : 윗줄 왼쪽부터 이재현 아주대 교수(첨단신소재공학과·대학원 에너지시스템학과), 이승기 부산대 교수(재료공학부), 조성호 삼성디스플레이 부사장. 아래 왼쪽부터 아주대 김승일 박사과정 학생(대학원 에너지시스템학과), 문지윤 아주대 박사후연구원(대학원 에너지시스템학과), 형석기 아주대·한국과학기술연구원 박사과정 학생(신소재공학과). 김승일 박사과정생은 BK21사업 우수대학원생으로 선발되어 미국 워싱턴대학 세인트루이스에 방문연구원으로 재직 중이다. * 연구 주요 내용 영상으로 보기
-
147
- 작성자통합 관리자
- 작성일2024-04-16
- 2076
- 동영상동영상
-
우리 학교 박은덕 교수팀이 태양광을 활용해 고부가가치 화합물을 제조할 수 있는 친환경 기술을 개발했다. 지속가능한 방법으로 부가가치가 높은 화합물을 생산할 수 있는 새로운 길을 제시함으로써 에너지 저감과 환경 문제 해결에 기여할 수 있을 것으로 전망된다. 해당 연구는 ‘2상 전해질에서 브롬 발생을 통한 고 선택성 탠덤 광전기화학적 탄소-수소 결합 활성화(Highly Selective Tandem Photoelectrochemical C–H Activation via Bromine Evolution Reaction in Two-Phase Electrolyte)’라는 논문으로, <저널 오브 더 아메리칸 케미칼 소사이어티(Journal of the American Chemical Society)> 2월호에 게재됐다. 박은덕 교수(화학공학과·대학원 에너지시스템학과, 위 사진 제일 왼쪽)가 교신저자로, 아주대 채상윤 박사후 연구원(대학원 에너지시스템학과·차세대에너지과학연구소, 위 사진 가운데)·아딜 메흐무드(Adeel Mehmood) 대학원 에너지시스템학과 박사과정 학생(위 사진 오른쪽)이 제1저자로 참여했다. 화학 산업에서는 지속가능하며 친환경적인 방식으로 고부가가치 화합물을 만드는 방안에 대한 연구가 점차 중요해지고 있다. 석유화학·철강 산업 등에 쓰이는 화합물을 제조하는 공정에서 많은 에너지가 사용되고, 그 과정에서 이산화탄소와 같은 온실가스나 다른 유해 물질이 발생해 인체·환경에 나쁜 영향을 줄 수 있기 때문이다. 특히 탄소와 수소의 결합을 활성화하는 반응이 화학 공정에서 아주 중요한데, 이를 위해서는 유독한 가스나 많은 양의 유기용매를 사용해야 하는 문제가 있다. 이러한 문제를 해결하기 위해서는 태양광을 비롯한 재생에너지를 사용해 화합물을 만드는 방법이 이상적이다. 광전기 화학전지 시스템을 이용하면 태양광을 화학에너지로 바꿀 수 있고, 이 에너지를 이용해 유기물의 탄소-수소 결합을 활성화하면 고부가가치 화합물로 만들 수 있다. 동시에 수소도 생산할 수 있다. 이 과정에서 중요한 것은 이런 반응을 잘 일으킬 수 있는 적당한 반도체 광전극 및 시스템을 개발하는 것이다. 기존에 널리 활용되어온 방안은 탄소-수소 결합의 할로겐화 반응을 이용하는 것으로, 반응물과 할로겐 원소가 하나의 전해질에 용해되어 있는 시스템이다. 그러나 이 시스템의 경우 고가의 할로겐 유기화합물을 사용해야 하는 데다, 반응물의 과산화 및 낮은 용해도가 한계로 여겨져 왔다. 아주대 연구팀은 이 문제를 해결하기 위해 할로겐 원소와 반응물을 별도의 전해질로 분리하는 방법을 고안해냈다. 덕분에 부반응을 차단하면서, 많은 양의 화합물을 생성시킬 수 있었다. 연구팀은 또한 유독한 할로겐 가스를 직접 사용하지 않고, 친환경적인 브롬화 이온으로부터 태양광을 이용해 반응에 필요한 브롬가스를 실시간으로 공급했다. 연구팀은 태양광-브롬 생산을 위해 산화루테늄이 도포된 질화탄탈럼(Ta3N5) 반도체 광양극을 개발했으며, 해당 광양극은 수계전해질 조건에서 경쟁 반응인 산소 발생이 전혀 없이 브롬만을 선택적으로 생산함을 확인했다. 생성된 브롬은 태양광에 의해 브롬 라디칼로 전환되어 여러 유기물의 탄소-수소 결합을 효과적으로 활성화하고, 고부가가치 화합물을 생성시켰다. 연구팀은 또한 인화인듐 광음극과 질화탄탈럼 광양극을 동시에 이용, 추가적인 에너지 공급이 없이 오직 태양광만으로 브롬을 생산하고 탄화수소의 탄소-수소 결합을 선택적으로 활성화하여 고부가 화합물을 제조하는 친환경 시스템을 구현해냈다. 박은덕 교수는 “유독한 할로겐 가스의 사용을 피하고 태양광을 활용해 환경친화적인 방식으로 여러 유기물의 탄소-수소 결합을 활성화, 부가가치가 높은 화합물을 생성하는 기술”이라며 “그와 동시에 청정에너지인 수소를 함께 생산하는 시스템이라는 점에서 중요한 의미를 가진다”라고 설명했다.박 교수는 “태양광을 이용해 할로겐을 시스템 내에서 자체 생산함으로써, 환경과 인체에 미치는 부정적 영향을 최소화하고 에너지 저감에 기여할 수 있을 것”이라며 “할로겐 원소와 반응물을 분리 반응시킴으로써 부산물 생성을 차단하고 더 효율적인 화학반응을 가능하게 할 수 있어 고부가가치 화합물의 친환경적 생산에 새로운 길을 제시할 것으로 기대한다”라고 덧붙였다. 이번 연구는 한국연구재단의 C1 가스 리파이너리 사업과 기초연구지원사업의 지원으로 수행됐다.(왼쪽) 태양광과 광전기화학전지를 이용한 브롬화반응의 모식도 (오른쪽) 태양광을 이용한 고부가 화합물의 생성효율
-
145
- 작성자통합 관리자
- 작성일2024-04-16
- 1980
- 동영상동영상
-
우리 학교 화학과 유성주 교수팀이 메탄을 고부가가치 화합물로 전환하는 친환경 기술을 개발하는데 성공했다. 빛을 이용한 환경친화적 방식으로 지속가능한 에너지와 환경에 기여할 수 있는 기술이다.유성주 교수(화학과·대학원 에너지시스템학과) 연구팀은 플라즈몬 기술을 활용, 메탄의 선택적 산화 과정을 거쳐 고부가가치 화합물을 생산하는 친환경 화학 프로세스를 구현했다고 밝혔다. 해당 연구는 ‘산소 분자의 선택적 부분 산화 작용 촉진을 위한 저(低)에너지 화학 프로세스 연구(Plasmon-Driven Selective Methane Oxidation to Formic Acid at Ambient Conditions)’라는 논문으로 에너지 분야 국제 학술지인 <ACS 에너지 레터(ACS Energy Letters)>에 2월9일자로 출판됐다. 논문은 연구 우수성을 인정받아 표지논문(위 사진)으로 선정됐다. 이번 연구에는 박은덕 교수(화학공학과·대학원 에너지시스템학과)가 공동 교신저자로 참여했고, 투이 하 응우옌(Thuy Ha Nguyen) 대학원 에너지시스템학과 박사과정 학생이 제1저자로 함께 했다. 최근 천연가스의 주요 성분인 메탄(CH4)의 온실효과 영향에 대한 지적이 제기됐다. 가정용·산업용 연료로 널리 활용되는 메탄이 이산화탄소(CO2)보다 약 23배 강력한 온실효과를 일으킨다는 것이다. 지속가능한 에너지 미래를 위해 탄소자원화 연구를 활발하게 진행 중인 유성주 교수 연구팀은 메탄의 친환경 활용 방안에 주목했다. 화학계에서는 메탄을 유용물질로 전환하는 연구가 활발히 이루어지고 있다. 하지만 메탄을 알코올, 알데히드, 산과 같은 유용한 화합물로 전환시키기 위해서는 원래 에너지 소비가 높은 여러 단계의 복잡한 과정을 거쳐야 했다. 이 과정에서 온실가스 방출 관련 대기환경 문제와 고가의 산화제 사용 등 경제적 효율성이 떨어지는 문제점이 발생했다. 아주대 연구팀은 이러한 한계를 극복하기 위해 빛과 금 나노입자의 분광학적 상호작용을 이용해 산소(O2)의 양자역학적 성질을 변화시켜 메탄의 완전 산화 경로를 억제하는 저에너지 화학 프로세스를 개발했다. 금 나노입자의 표면 플라즈몬 공명 특성을 활용하여 산소(O2) 분자의 스핀 상태를 삼중항에서 단일항으로 변화시킨 것. 단일항으로 스핀 전이된 산소는 동일한 스핀 상태의 메탄과 상온에서 쉽게 결합을 형성했다. 아주대 연구팀은 메탄 산화 과정에 필요한 활성화 에너지를 효과적으로 낮추는 상온상압 금속 촉매 및 반응 시스템을 구현했고, 메탄은 고온고압의 과정을 거치지 않음으로써 완전 산화되는 경로가 억제됐다.연구팀은 이러한 부분 산화 반응으로 기체 상태의 메탄을 고부가가치 화합물인 액체 상태의 포름산(HCOOH)으로 97% 이상 전환에 성공했다. 전환된 포름산은 섬유, 바이오 등 다양한 산업에서 활용될 뿐만 아니라 수소(H2)의 저장과 이동 시 사용할 수 있는 화합물로, 미래 지속가능한 에너지 활용에 중요한 화합물이라는 점에서 이번 연구는 큰 의의가 있다. 유성주 교수는 “이 연구는 분자의 스핀 전이가 관여된 촉매작용에 관한 연구 결과로 새로운 탄소자원화 방안을 제시한 점, 현 분야의 이슈들 중 하나인 산화작용의 원리를 규명한 점에서 학술적 의의가 있다”라고 말했다.이어 유 교수는 “이번에 개발한 기술은 산소 분자의 양자역학적 특성 조작으로 기존 메탄 활용 기술에 필요한 에너지 소모량과 이산화탄소 배출을 획기적으로 감소시킨 유용한 친환경 기술”이라며 “앞으로 지속적인 연구를 통해 고효율 화학 기술 공정 개발과 탄소 활용, 수소에너지, 미세먼지 등 미래 에너지 환경 문제 해결에 도움 될 수 있기를 기대한다”라고 말했다. 이번 연구는 한국연구재단 한국연구재단의 C1가스리파이너리사업, 자율운영 중점연구소지원사업, 우수신진연구의 지원으로 수행됐다.이번 연구를 주도한 아주대 연구진. 왼쪽부터 유성주 교수, 박은덕 교수, 투이 하 응우옌(Thuy Ha Nguyen) 박사과정 학생
-
143
- 작성자통합 관리자
- 작성일2024-04-05
- 1990
- 동영상동영상
-
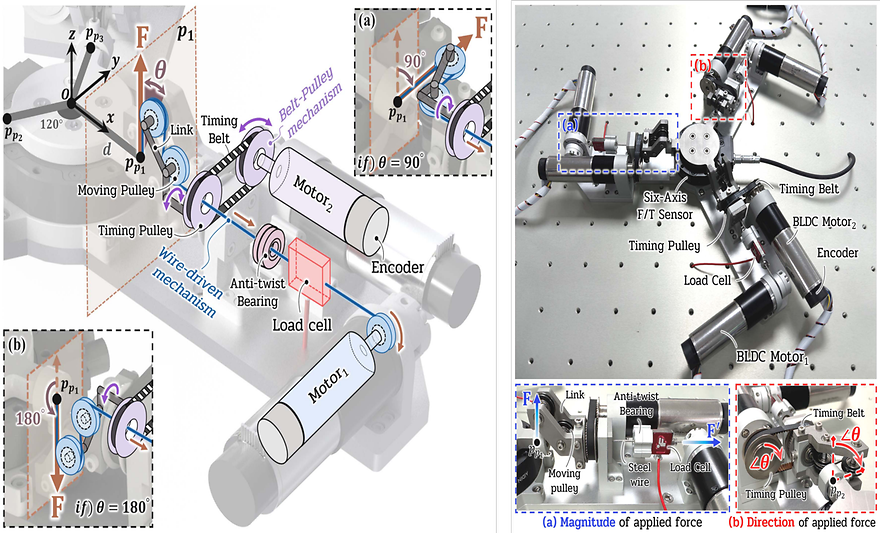
우리 학교 기계공학과 김의겸 교수팀이 다양한 힘 조합이 가능한 자동화 로봇 보정 장치를 개발했다. 이에 로봇의 센서로 널리 활용될 수 있을 전망이다.연구 내용은 ‘다축 힘토크 센서의 정밀 보정용 다양한 힘 조합이 가능한 자동화 로봇 보정 장치(Automated Calibration Robotic System Capable of Producing Versatile Force Combinations for Multiaxis Force/Torque Sensors)’라는 제목으로, 자동화 및 제어 분야 저명학술지인 <IEEE 산업정보학학회 저널(IEEE Transactions on Industrial Informatics, IF: 12.3, JCR%=2.3%)에 지난 13일 게재됐다.이번 연구에는 아주대 기계공학과 대학원 황진학 학생(석사과정)이 제1저자로, 이우성·이세란 학생이 공동저자로 참여했다. (주)에이딘로보틱스 김용범 박사(공동저자)와 김의겸 교수(교신저자)도 함께 참여했다.6축 힘/토크센서는 휴머노이드 및 다양한 로봇 시스템에서 중요한 구성요소이다. 하나의 센서에서 6축의 모든 힘을 측정할 수 있기 때문에 로봇이 섬세한 힘 제어가 가능하다. 하지만, 현재까지 이를 자동으로 보정할 수 있는 시스템이 존재하지 않았기 때문에 매번 사람이 수작업으로 보정 작업을 수행해야 했다. 센서 초기 데이터를 원하는 힘의 단위로 변환 시켜주기 위해서는 보정 작업이 필요하다. 때문에 센서의 가격이 높아지고, 로봇 센서보편화에 한계로 작용해왔다. 6축 힘/토크의 보정은 단순히 한 축 방향의 힘만을 분석하는 것이 아니라, 6축 축방향의 모든 힘의 비선형성과 축간간섭현상(crosstalk phenomenon)을 고려해야 하기 때문에 고난도의 기술력을 요구한다. 이를 자동화 시키는 것은 더욱 도전적인 문제이기 때문에, 그동안 힘 센서 연구 활동은 많았지만 현재까지 이를 완전히 해결하지는 못했다.아주대 김의겸 교수 연구팀은 원천적인 새로운 메커니즘 개발부터 디자인, 제어, AI, 구현까지 원천 및 응용 기술 개발을 진행했다. 이를 통해 6축 힘/토크에 대한 모든 조합을 구현하면서도 로봇 자동화가 가능한 로봇 시스템을 개발했다. 3개의 수직력과 3개의 수평력을 사용하여 6축 힘/토크를 생성하는 새로운 원리를 제안한 것. 국내에서 협동로봇시장이 확대됨에 따라 로봇 및 인간의 안전 문제를 해결하기 위해 로봇용 센서는 필수적인 구성 요소가 될 것으로 보인다. 이에 아주대 연구팀의 연구 성과가 시장 확대에 기여할 수 있을 전망이다. 김의겸 교수는 "공학자로서 사람들의 삶을 더 윤택하게 하는데 도움이 될 연구를 이어가고 싶다"며 "학술적으로 가치가 높으면서도, 실제 산업과 사회에서 쓸모있는 기술을 개발하기 위해 노력할 것"이라고 말했다.이번 연구는 산업통상자원부의 로봇산업핵심기술개발사업의 지원으로 수행됐다.#위 사진 설명 : 왼쪽부터 기계공학과 김의겸 교수와 기계공학과 석사과정 황진학 학생
-
141
- 작성자통합 관리자
- 작성일2024-04-05
- 2076
- 동영상동영상